欢迎来到工业机器人实践课程
选择下方练习题,开始你的虚拟仿真学习之旅。
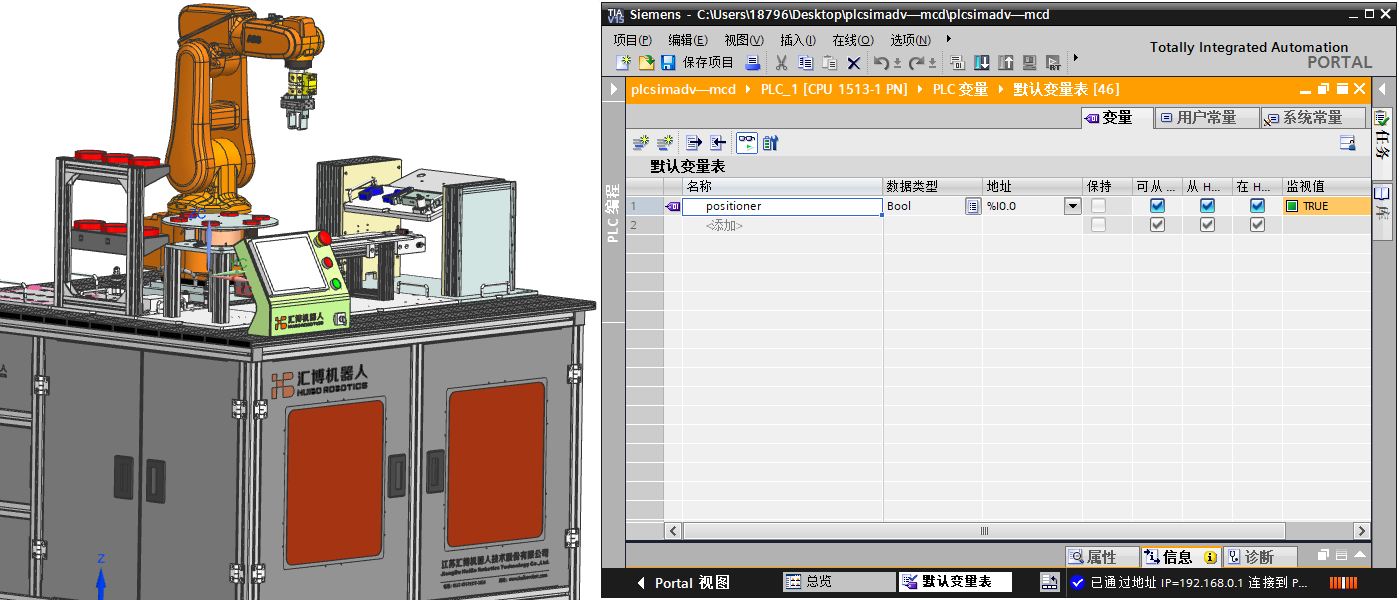
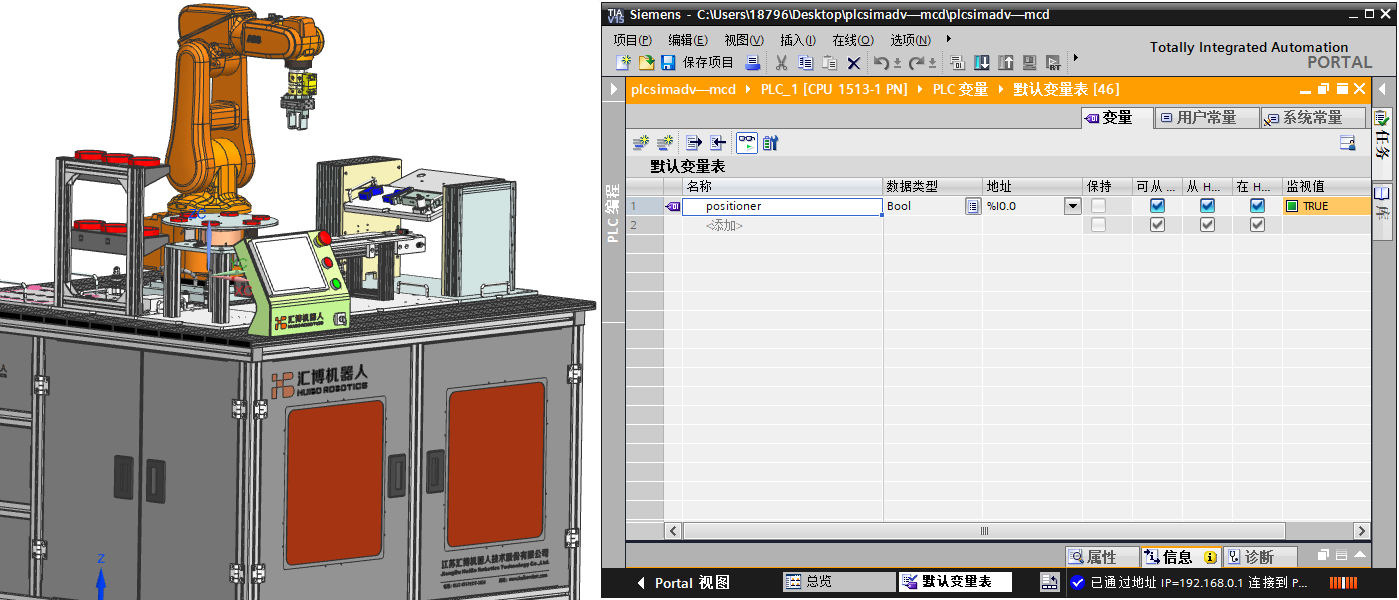
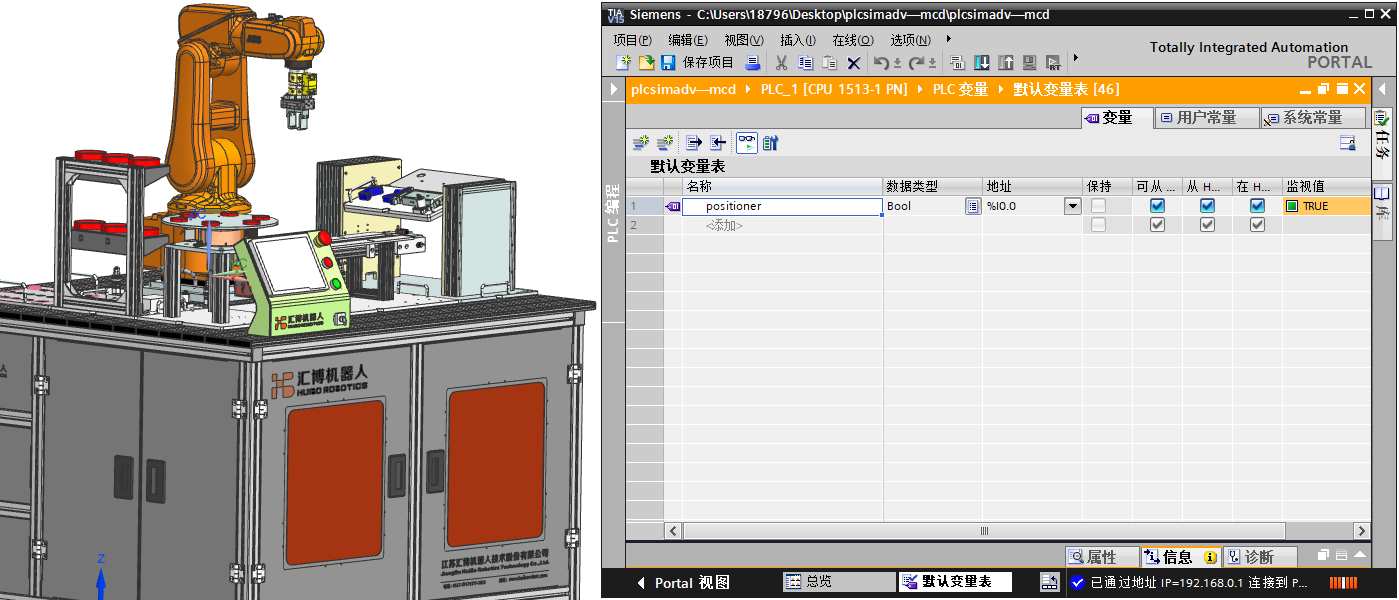
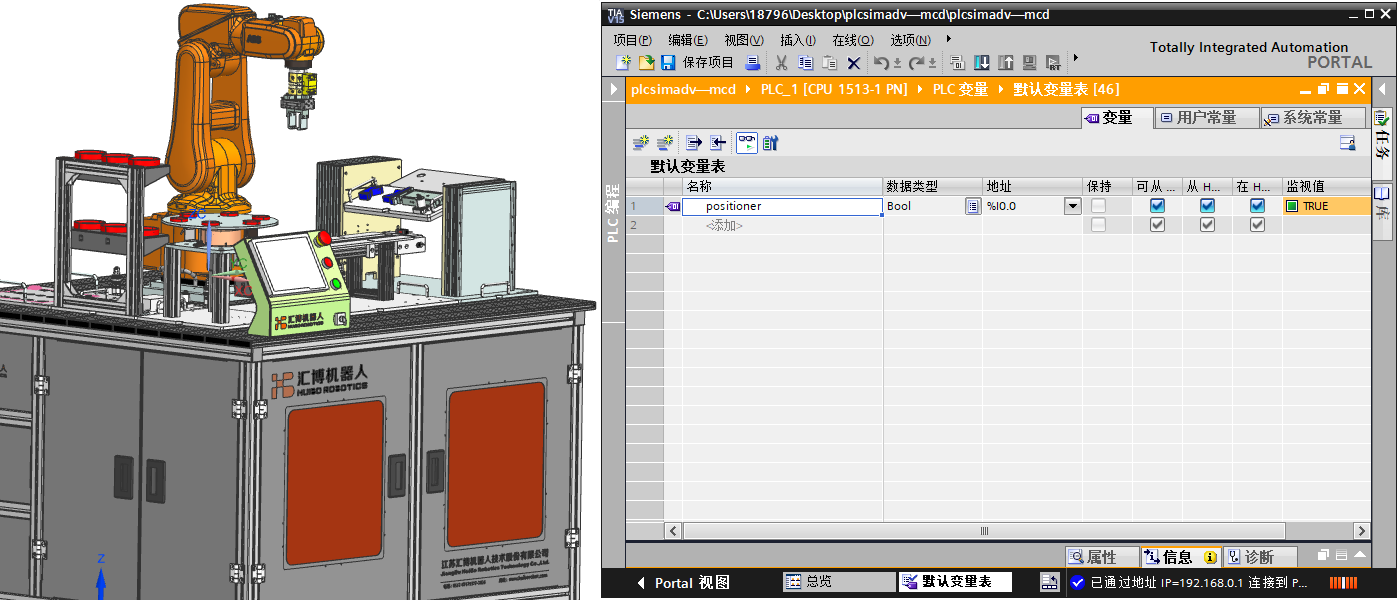
PLCSIM Advanced
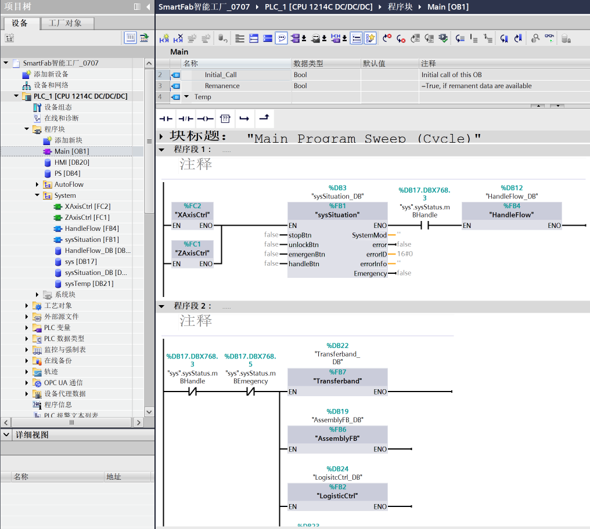
PLC基础设置
2人一组,设计协作机器人装配的PLC程序,机器人的动作可以使用修改变量代替。装配流程包括:放置底座→识别底座→底座...
请先登录系统
KUKA Sim Pro
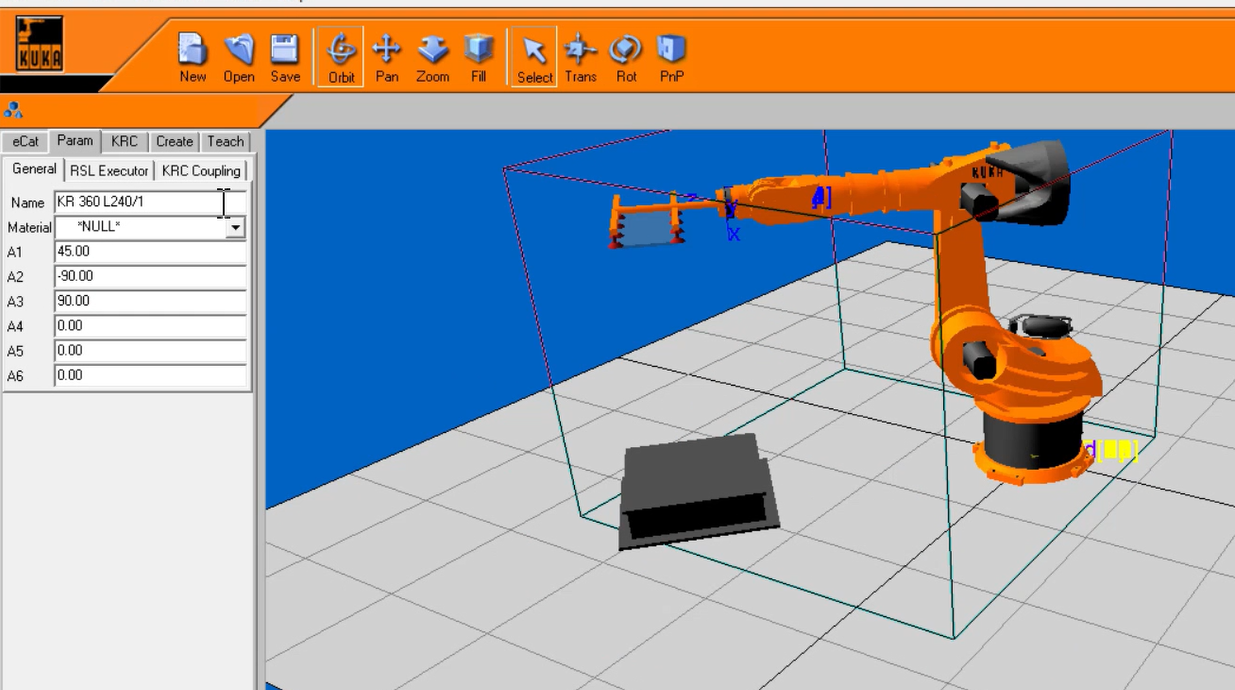
KUKA机器人离线编程
在Sim Pro软件中进行模型导入、布局调整、程序编写、虚拟仿真,实现KUKA机械臂配合工业第七轴的工件抓取并放置任务。
请先登录系统
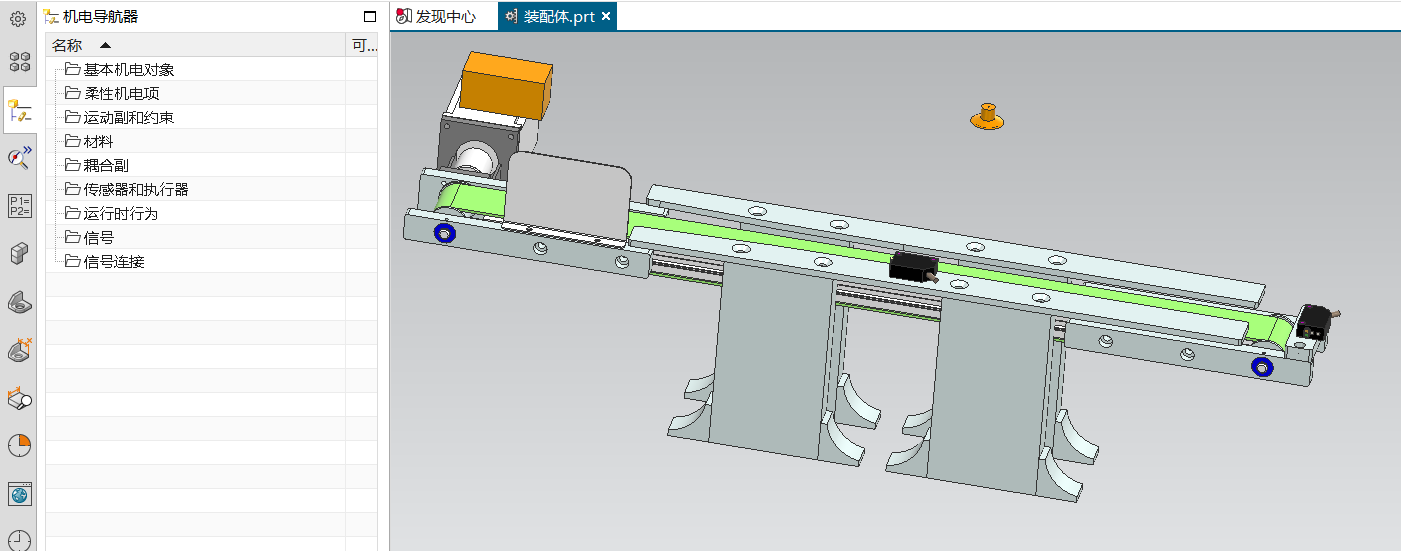
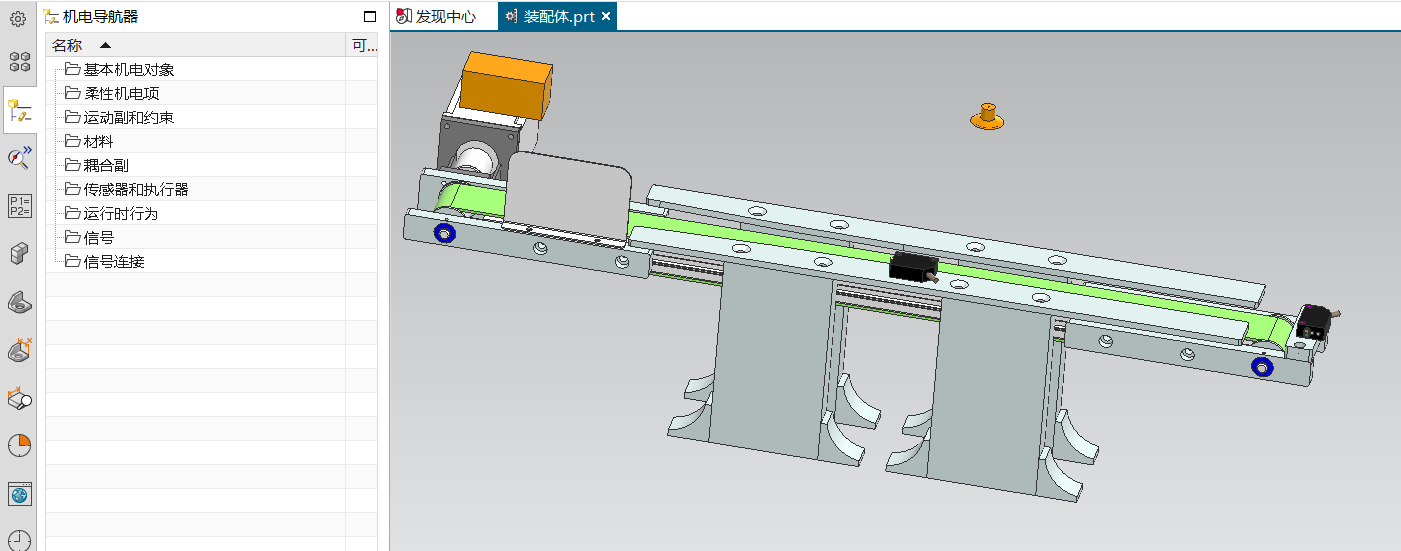
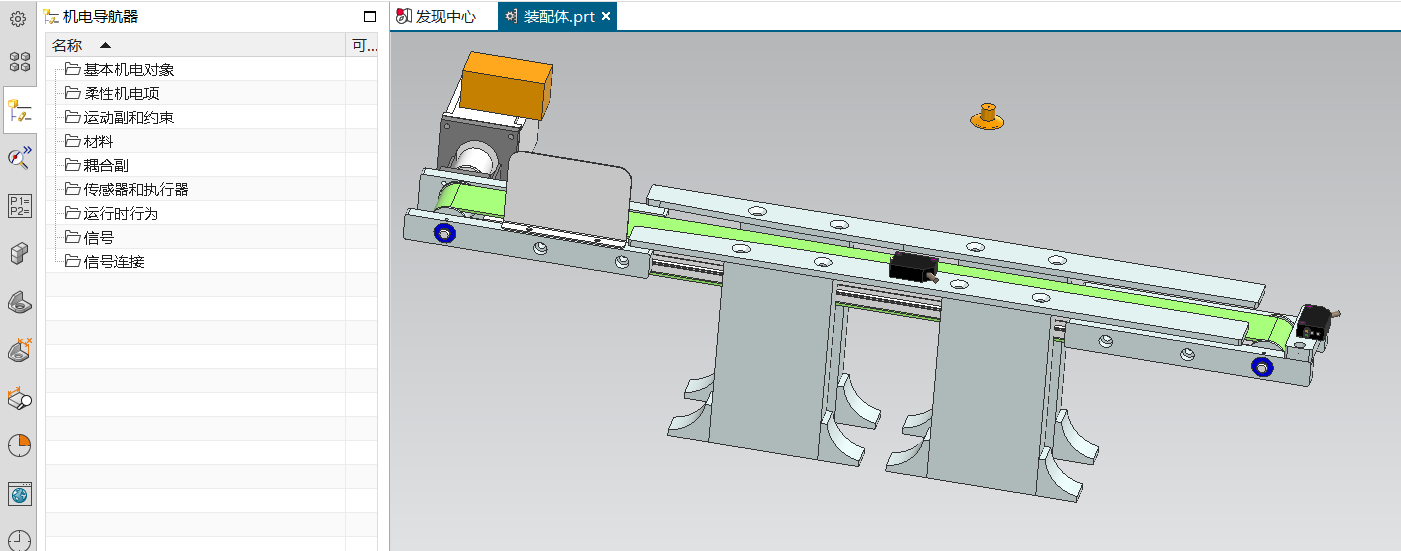
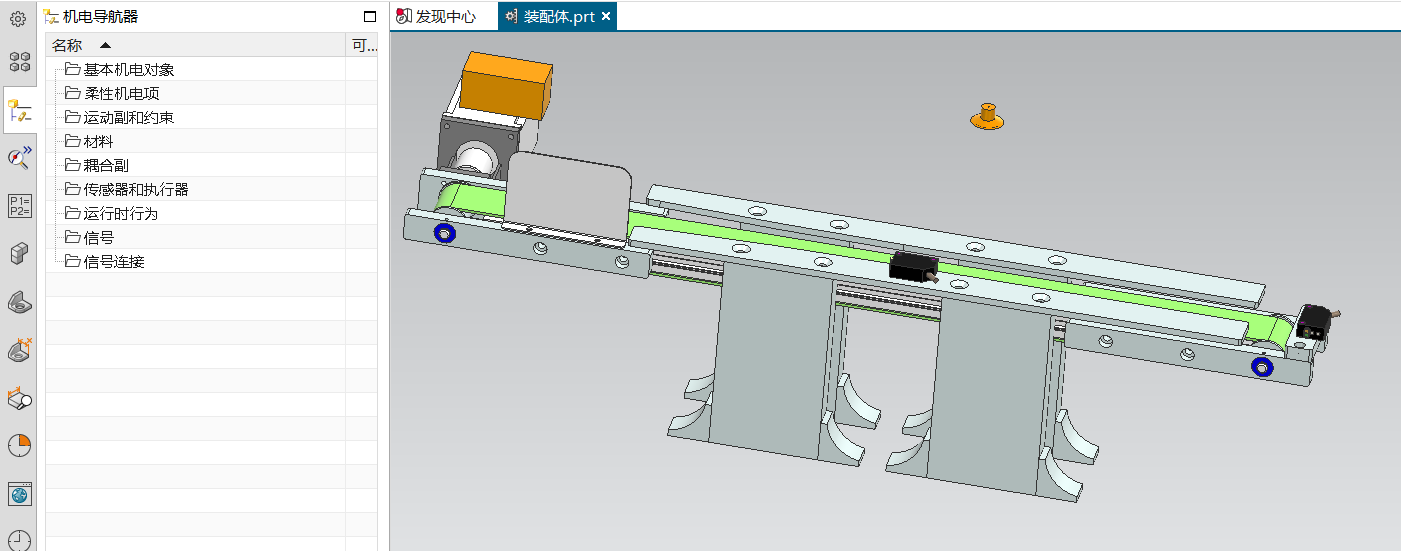
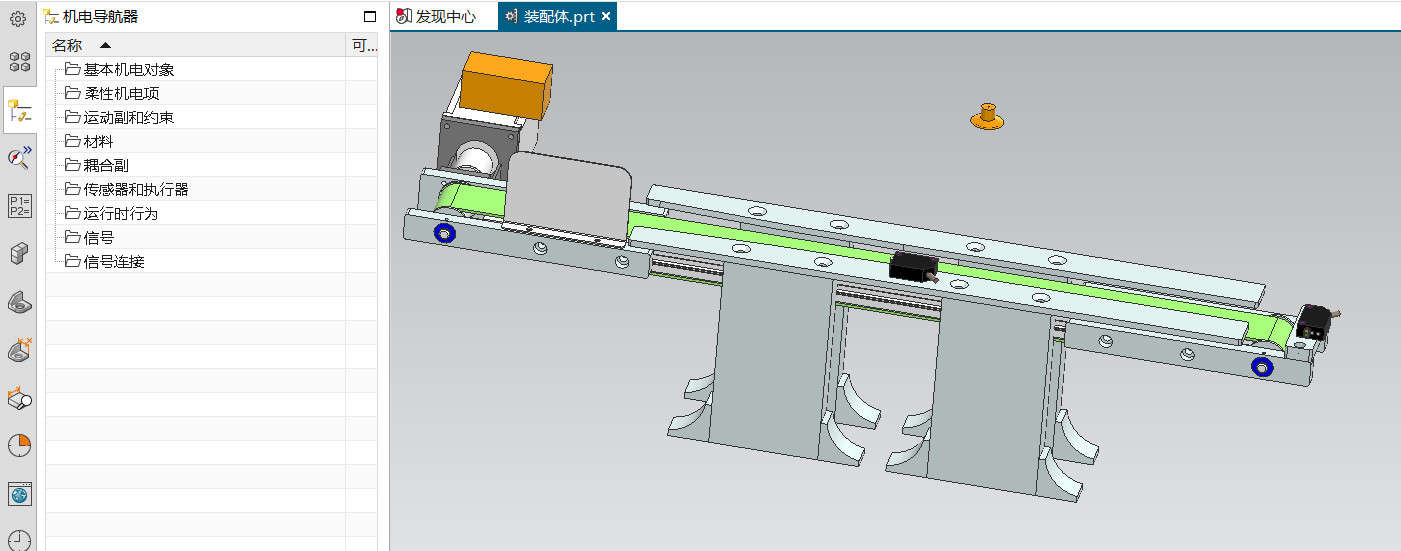
NX MCD
NX和sim Advanced联合调试——获取信号控制变量
在给予的NX工程文件中,将所需的信号控制部分另存为csv表格用于TIA Portal中的PLC数据块输入。 ...
请先登录系统
NX基础设置——创建碰撞/距离传感器
能够使用“创建碰撞传感器/距离传感器”命令,对给予的模型元件进行传感器设置。 提交要求:将资源管理器中创建完...
请先登录系统
NX基础设置——创建传输面
能够使用“创建传输面”命令,对给予的模型元件进行传输面设置。 提交要求:将资源管理器中创建完成的传输面序列截...
请先登录系统
NX基础设置——创建碰撞体
能够使用“创建碰撞体”命令,对给予的NX模型元件进行碰撞体设置。 提交要求:将资源管理器中创建完成的碰撞体序...
请先登录系统
NX基础设置——创建刚体
能够使用“创建刚体”命令,对给予的模型元件进行刚体设置。 提交要求:将资源管理器中创建完成的刚体序列截屏,重...
请先登录系统
NX和sim Advanced联合调试——配置HMI
依据配置的PLC——main数据块和DB数据块,完成对HMI的界面配置。 提交要求:截屏一张图片,包括HMI...
请先登录系统
NX和sim Advanced联合调试——配置PLC
在TIA Portal中创建PLC,并且依据从NX中导出的信号文件完成PLC的配置和数据块编程。 提交要求:...
请先登录系统
NX基础设置——仿真序列
在完成所有初级基础设置的基础上,使用仿真序列/播放功能,完成将物料在传送带上动起来的仿真效果。 提交要求:将...
请先登录系统
NX和sim Advanced联合调试——NX信号映射和控制
能够借助sim Advanced完成Portal和NX的信号映射,并且使用HMI的按键控制NX模型仿真。 提...
请先登录系统
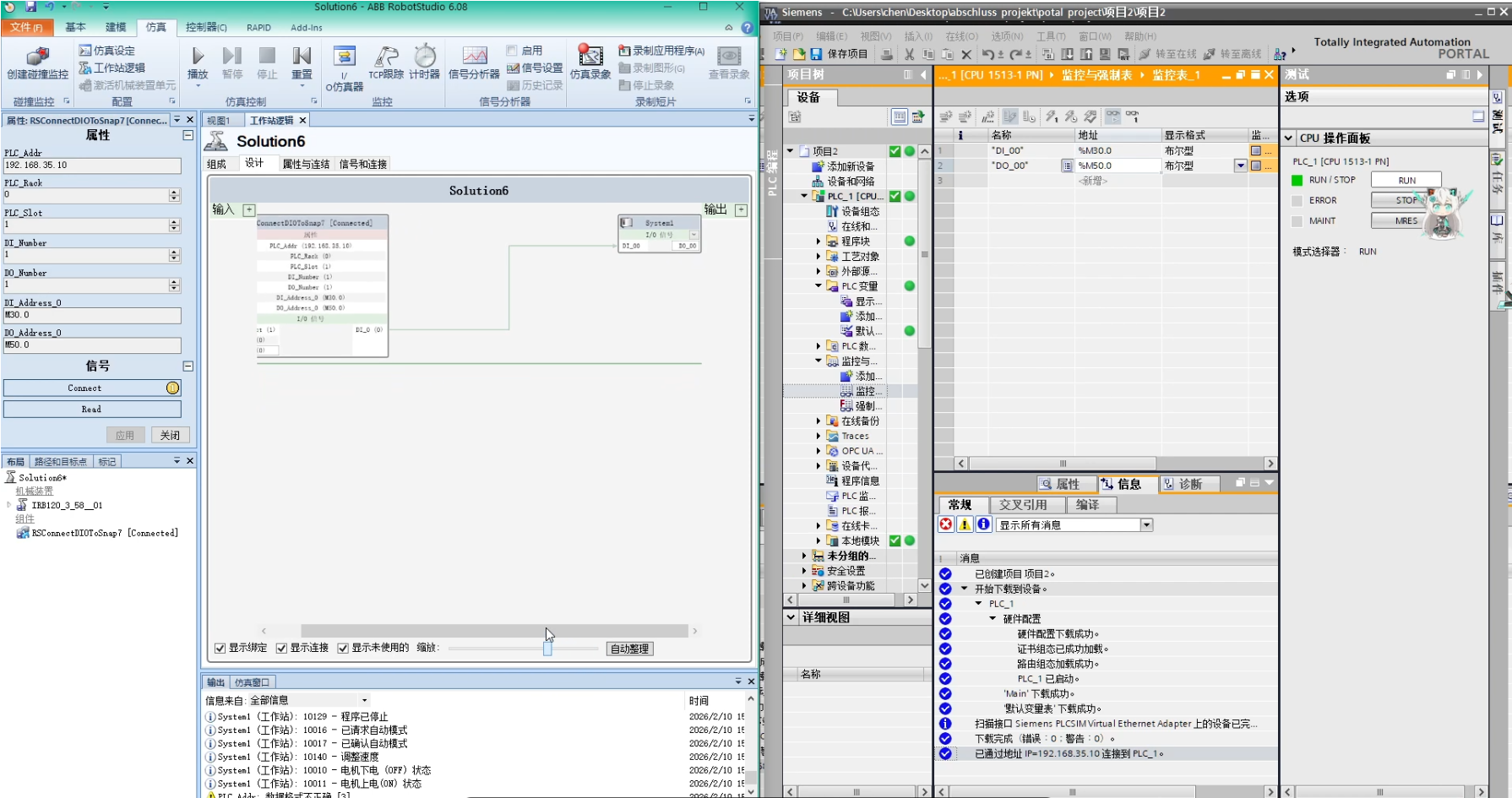
RobotStudio
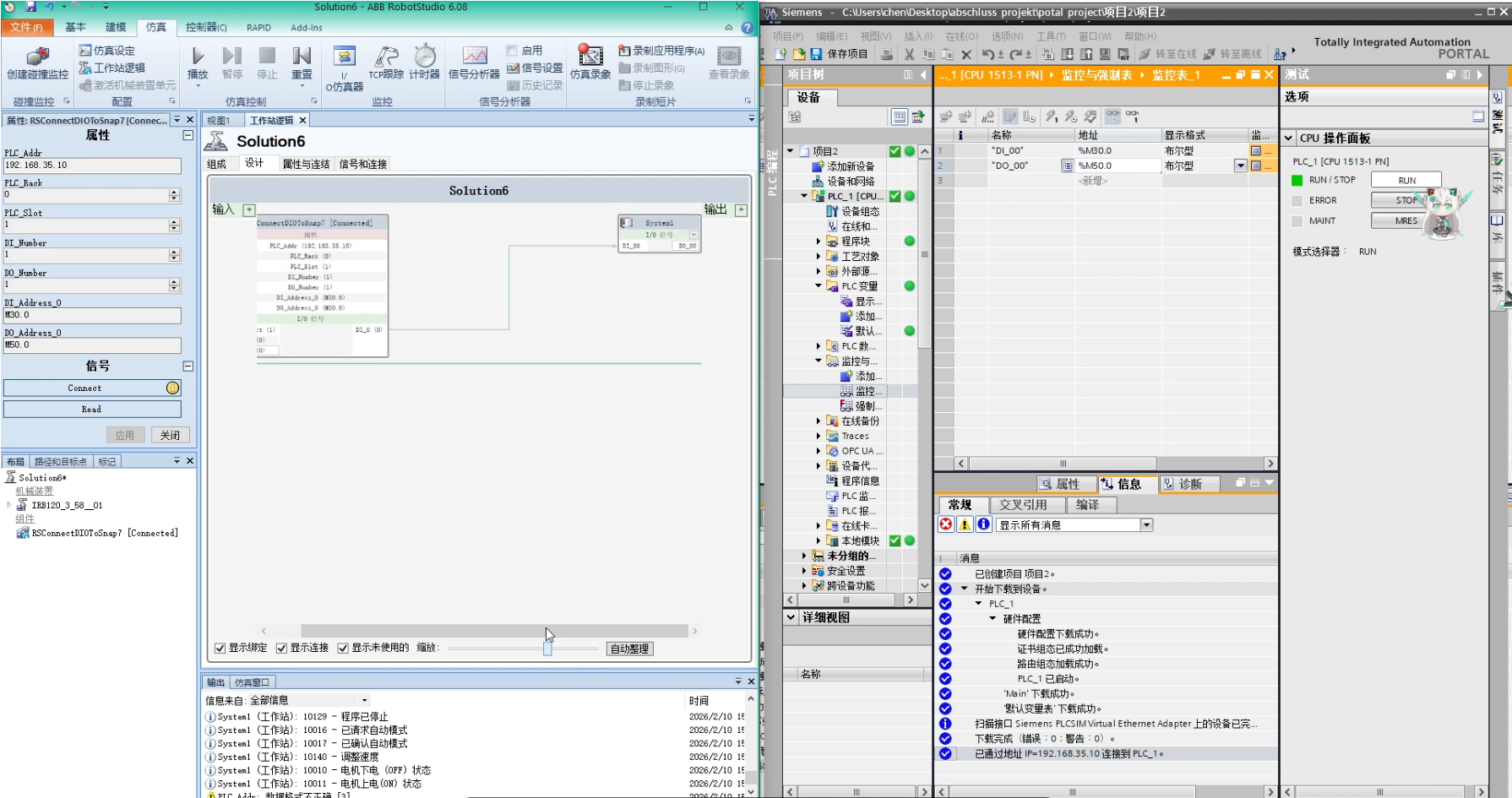
RobotStudio与sim Advanced联合调试
能够在博图中添加变量并利用snap7通信库搭建RobotStudio与PLC双向通信的桥梁,使得RobotStud...
请先登录系统
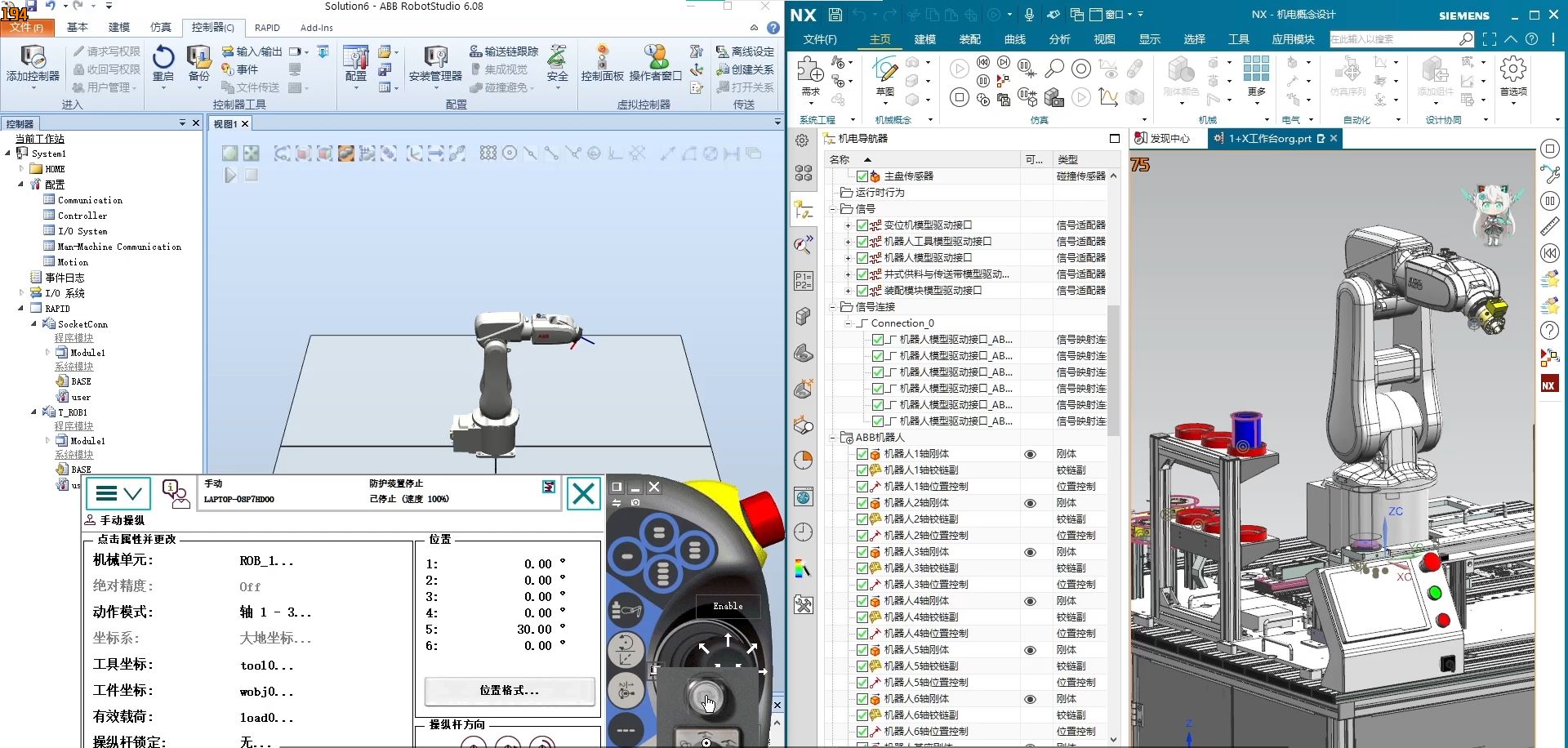
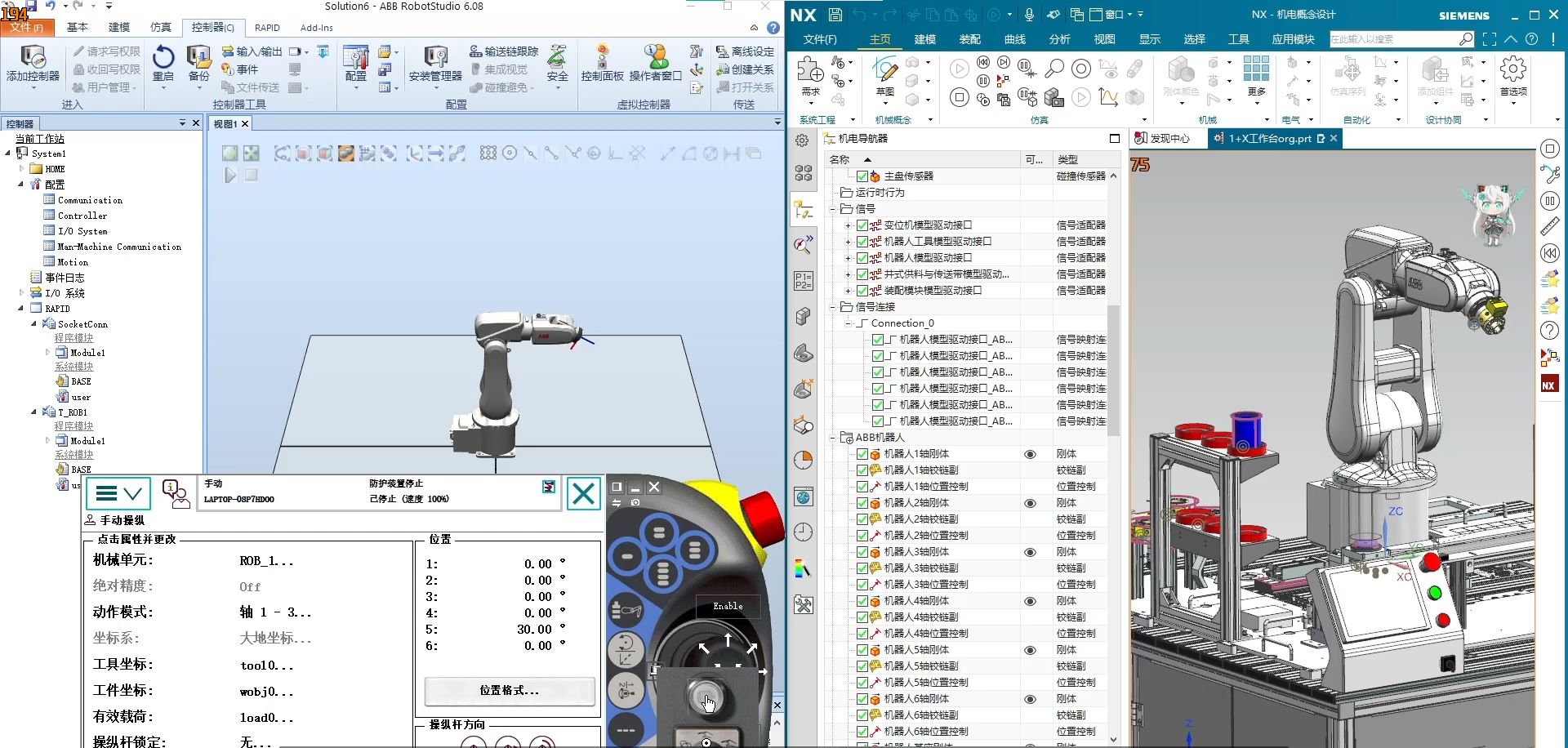
RobotStudio与NX联合调试——NX设置
在NX中导入”1+x工作台“,得到机器人模型。完成导入后配置NX信号等接收RobotStudio发送的6个机器人关...
请先登录系统
RobotStudio与NX联合调试——RobotStudio实现
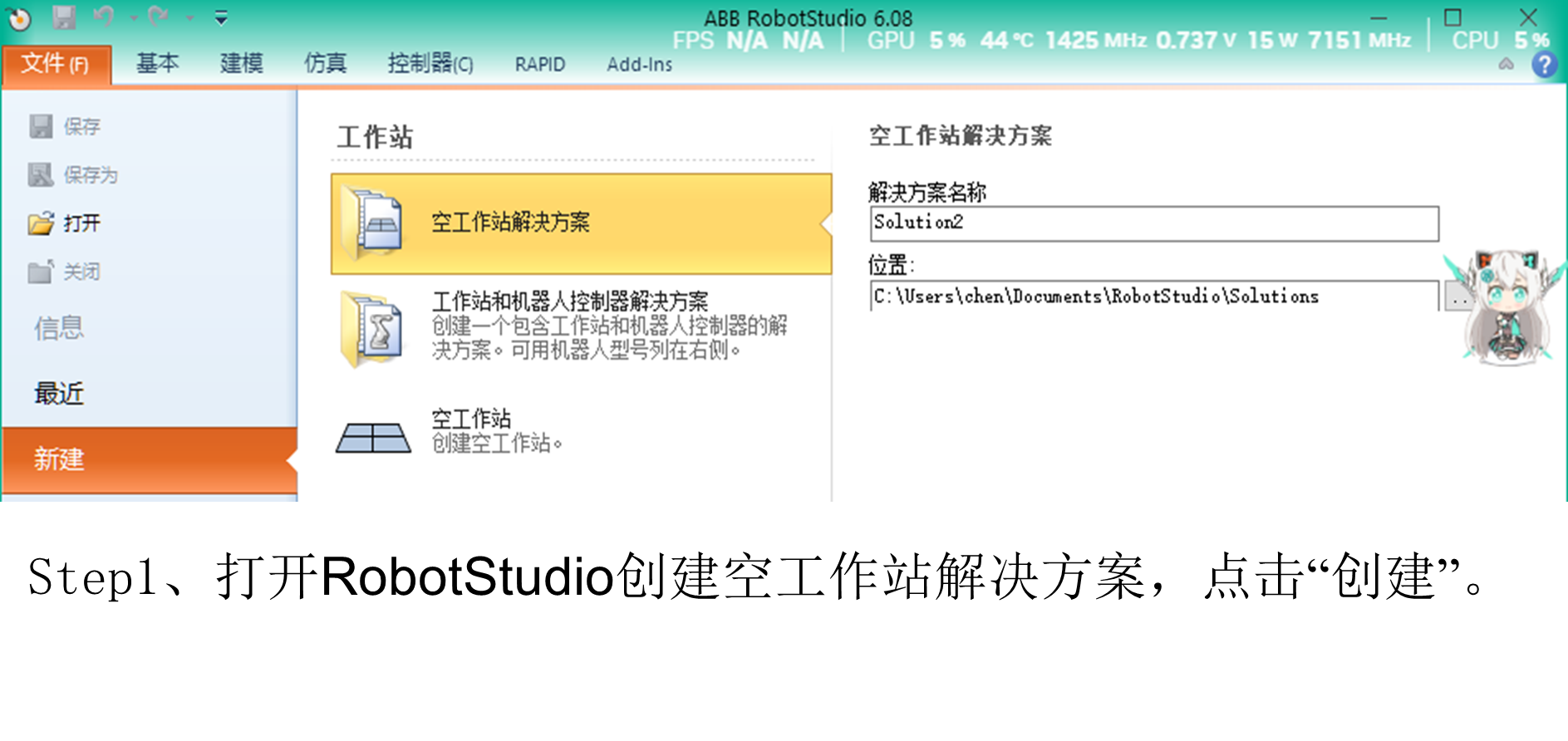
在RobotStudio中创建工作站解决方案,通过构建多任务与程序模块,使得RobotStudio可借助TCP协议...
请先登录系统
RobotStudio与NX联合调试——基本原理教学
基于TCP实现RobotStudio与NX之间通讯并完成联合仿真,本部分主要介绍原理与实现机制。请认真观看教学视频...
请先登录系统
Robot Studio与NX MCD联合调试(测试链接,勿点)
验证RobotStudio虚拟控制器中的机器人关节角度(Joint Angles)是否能够通过自定义的TCP程序,...
请先登录系统
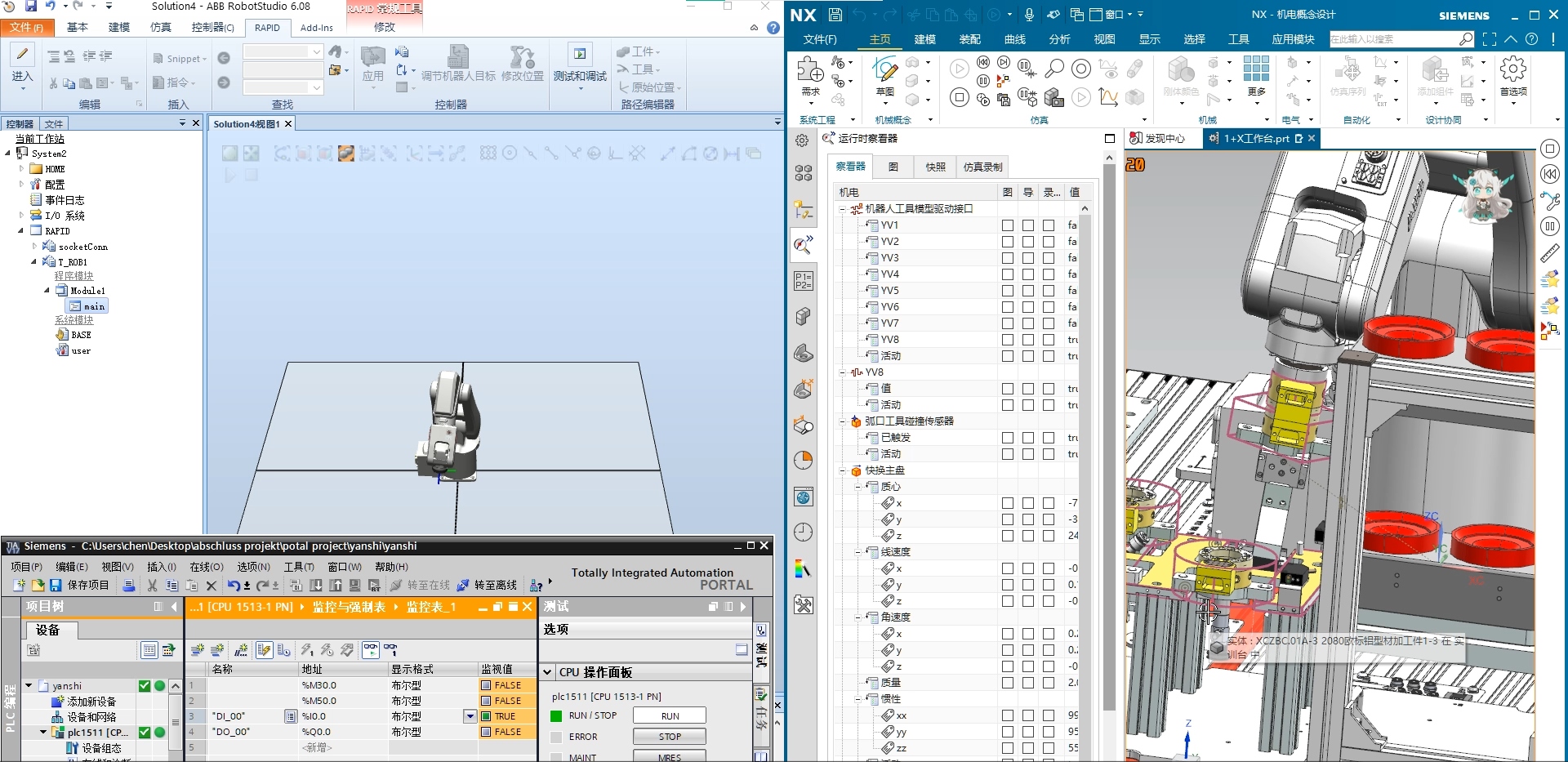
RobotStudio与sim Advanced联合调试——条件自动化程序
参照RobotStudio与sim Advanced联合调试进行,完成后在RobotStudio中编写一个RAPI...
请先登录系统
Robot Studio与NX MCD联合调试——自动化程序
参照RobotStudio与NX MCD联合调试,在RobotStudio增加一个自动化程序,使机械人可以在与NX...
请先登录系统
Robot Studio与NX MCD与sim Advanced三者联合调试
在完成Robot Studio与NX MCD联合调试——自动化程序、RobotStudio与sim Advance...
请先登录系统